Pcomp Midterm Concept And Progress
17 Oct 2019 - Jake Sherwood
 Rangefinder controlled ghost
Rangefinder controlled ghost
PCOMP Midterm - Concept and Progress.
For the PCOMP midterm we were paired up in groups to build a physical computer interaction.
Loosely themed on a Halloween theme but we could do something completely different if we wanted to.
My partner was Zoe and she already had some ideas based around the Halloween theme so we decided to just go with one of those.
We settled on the spooky ghost machine… name still pending.
Concept: The plan is to have it hidden and when someone gets close, it jumps out into view and scares them.
Zoe quickly made our initial ghost, using some fabric and one of the spooky masks from the week 6 applications group. We still plan to add to the ghost to make it a bit more spooky.
I was tasked with getting the servo motor set up to show the ghost.
I did a late night prototype with a ghost drawn on some paper towels. For the prototype I just used and FSR to control the movement but the final version will be controlled by a range finder.
paper ghost servo prototype
Having that roughly together.
Next we need to solidify our concept and decide how / where we would install this ghost, what sensor to use, and who would do what.
Working with Zoe had been pretty organic and we just kinda dived up work as we brainstormed how to do each task.
I would continue with the servo motor and figure out how we need to mount it so it would swing into view but hopefully not smack someone in the face.
I did some sketching to try to figure out how we should build the stand to hold everything. I also took some measurements from where we want to install.
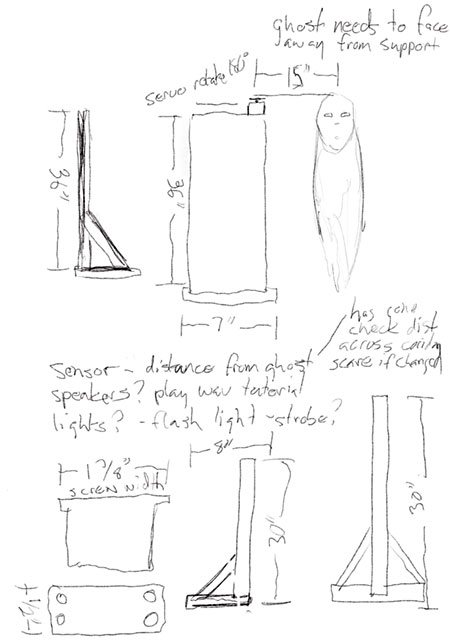
ghost stand sketches and measurements
Once I had my general measurements written down I started to look for some materials.
I had some scrap wood I was hoping I could use but it wasn’t long enough. I was looking for 36” from the windowsill so it would hopefully be high enough to not smack people in the face. My buddy Nikhil hooked me up with a perfect scrap of his the met our size requirements.
I planed to mount the servo on the top of the stand. I used brass tapping inserts and standoffs to mount it. I did a test mount on another scrap before I installed on the main material.
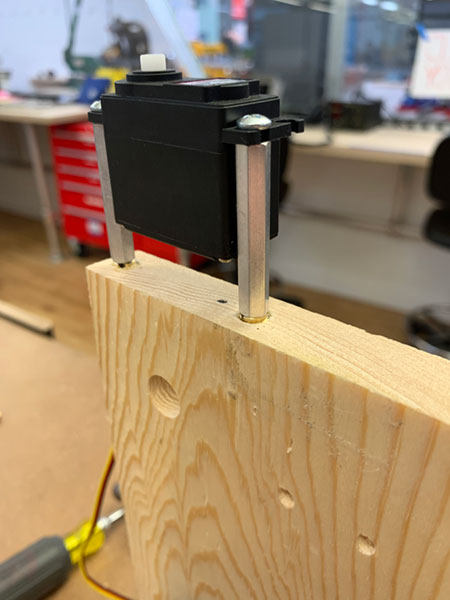
servo mount test

servo mount tapping inserts
The tapping mounts and the standoffs really gave it a nice snug fit and look.

pcomp midterm ghost stand w servo installed
We still plan to add sounds to the installation. But the holes in the scrap I got from my friend were perfect for speaker placement. I plan to look into playing random sound files with a SD card and an array of sounds.

ghost stand speaker placement
ghost stand test with FSR sketch
ghost stand corridor placement test
Zoe would continue to work on the ghost and write some code to interface with the rangefinder.
She got the rangefinder up and running pretty quick but we still need to confirm it will be sensitive enough for what we need.
range finder test
range finder corridor test
Things to still do
1)The arm of the ghost needs to be longer, so we can have the stand further into the windowsill and more hidden
2)Confirm sensitivity of sensor
3)Sort out sounds
4)Spookify the ghost more
5)Clean up / finish the stand
6)Install speaker
7)Clean up and combine Arduino sketchs
8)Decide if we can do everything on one Arduino or if we need two