Kimagnet
15 Mar 2021 - Jake Sherwood
 Kimagnet
Kimagnet
Kinetic sculpture
Kimagnet
Kimagnet is a kinetic sculpture that explores energy, magnetism, and movement.
Inspired by artist like Ivan Black, David C. Roy, and Takis, I’m interested in shapes and movement.
I wanted to experiment with harnessing kinetic energy and creating movement with different shapes.
An electromagnet at the center of the enclosure can be powered by crank or Arduino.
Turning the crank in the opposite direction will change the polarity of the electromagnet. Likewise when powered by the Arduino, an TB6612FNG h-bridge with toggle switches allows for changing the electromagnet polarity.
Toggle switches switch between crank or Arduino power driving the electromagnet, as well as allowing for toggling the current flow with the h-bridge.
The h-bridge is basically a series of 4 switches that can control the flow of current. When switched one way the curent flows in one direction and switched other the current flows in opposite directions. Most often used to control the direction of a motor it can also be used to control the polarity of an electromagnet.
I’m using a 12v 550rpm dc motor with a window crank to power the electromagnet.
I experimented with a few different motors and can generate about 5.2 -6 volts open circuit voltage from the crank just reading directly from a multimeter.
There is also a mini volt meter that works best under Arduino power. and sometimes depending on consistency of cranks will read out about 2 - 3.2 volts in crank power. I ended up reworking the circuit and now the meter only works on Arduino power.
Originally, when conceptualizing this project I was mostly thinking about the attraction of the hanging pendulum sculpture and the magnet. But I think the switched polarity and repulsion creates a more interesting effect.
 repulsion
repulsion
Fab
I made a simple prototype to begin with. It proved very helpful throughout and saw a few iterations itself. Most notable learning, don’t make the frame / stand out of ferromagnetic material. Not the best photo but below you can see my sculpture kept being attracted to the frame.
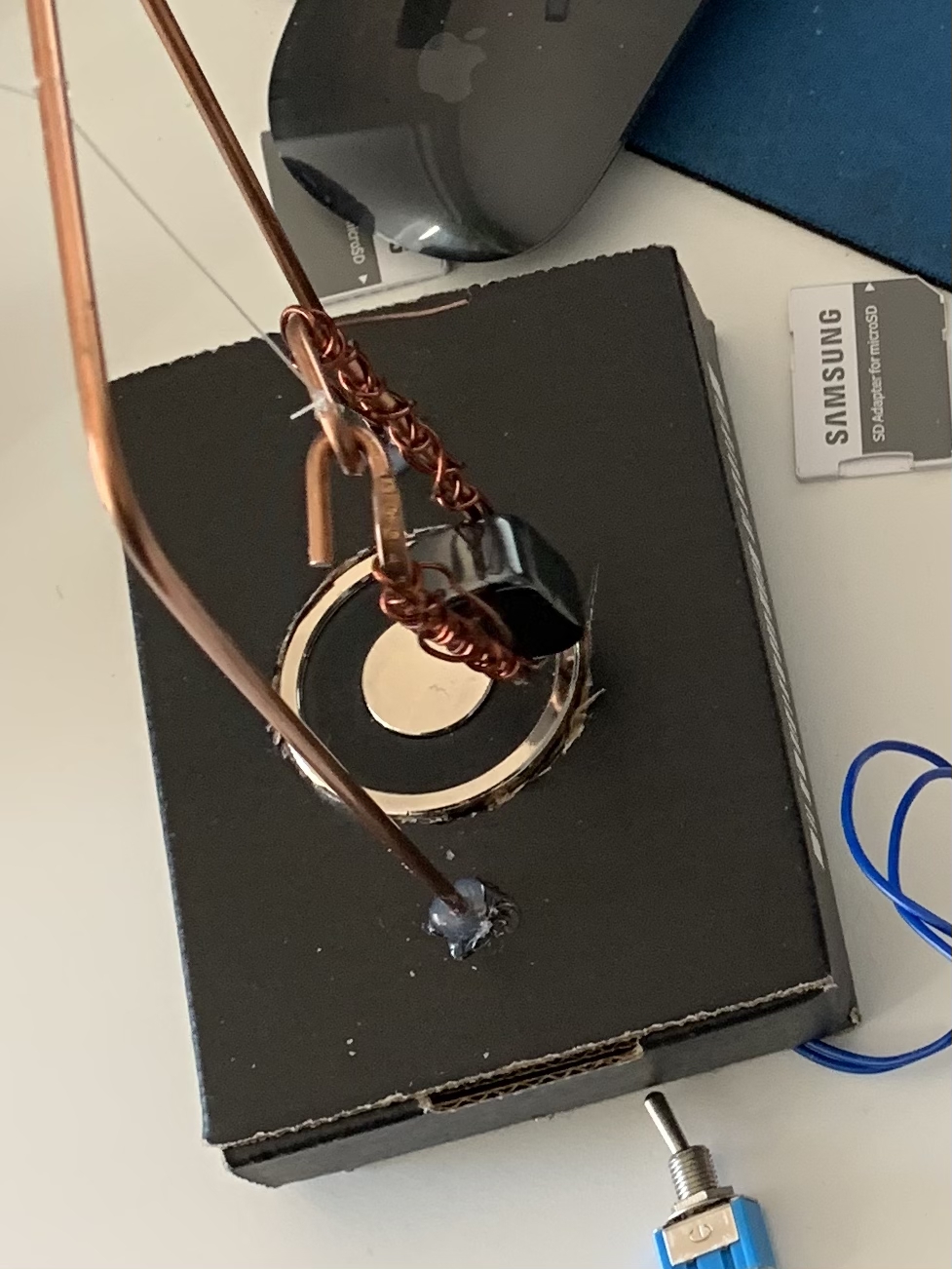 ferromagnetic frame
ferromagnetic frame
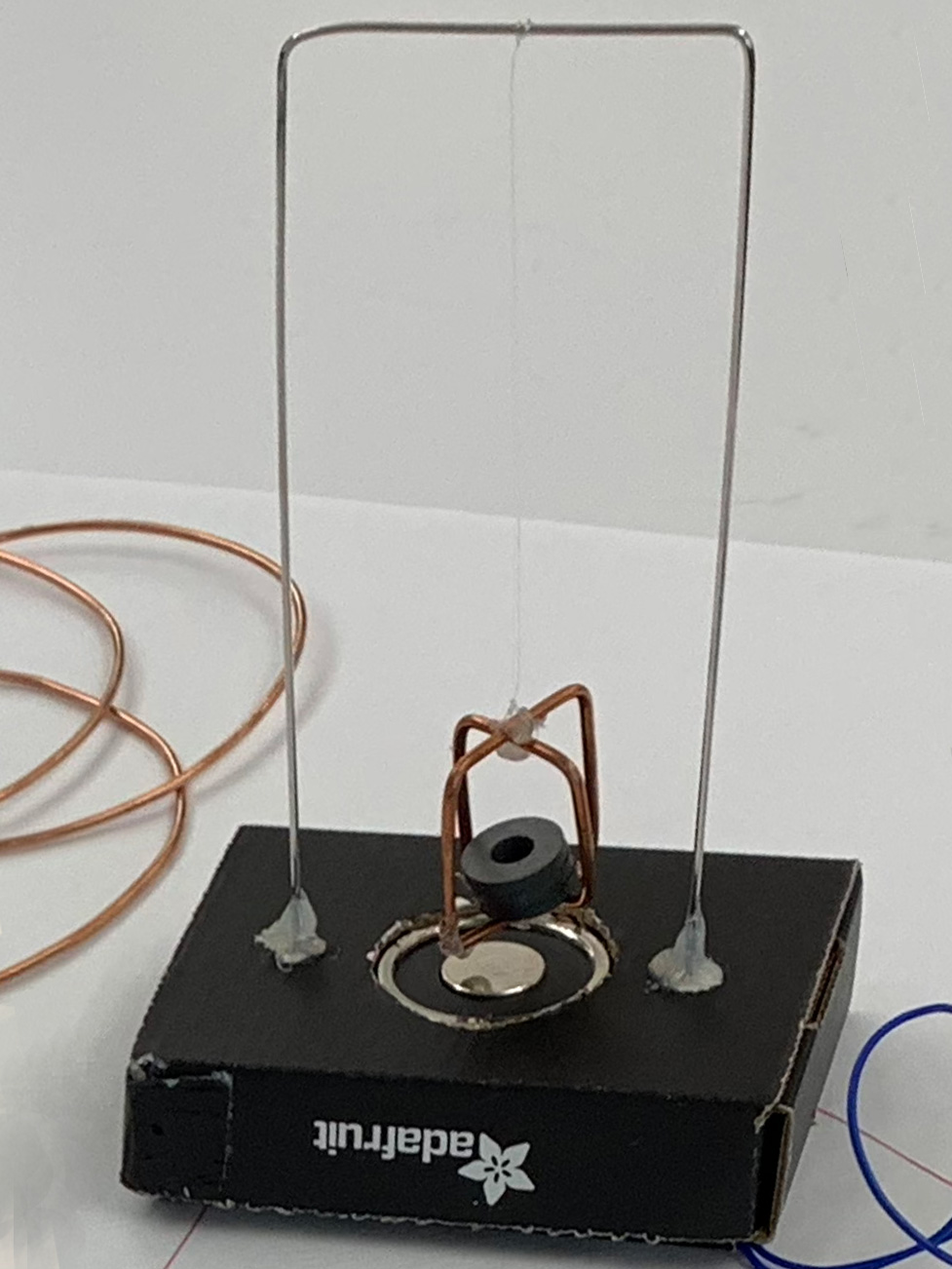 non-ferromagnetic frame
non-ferromagnetic frame
I redesigned the final piece to have one angled stem instead of the frame. This creates a much more dynamic aesthetic and reduces movement obstruction.
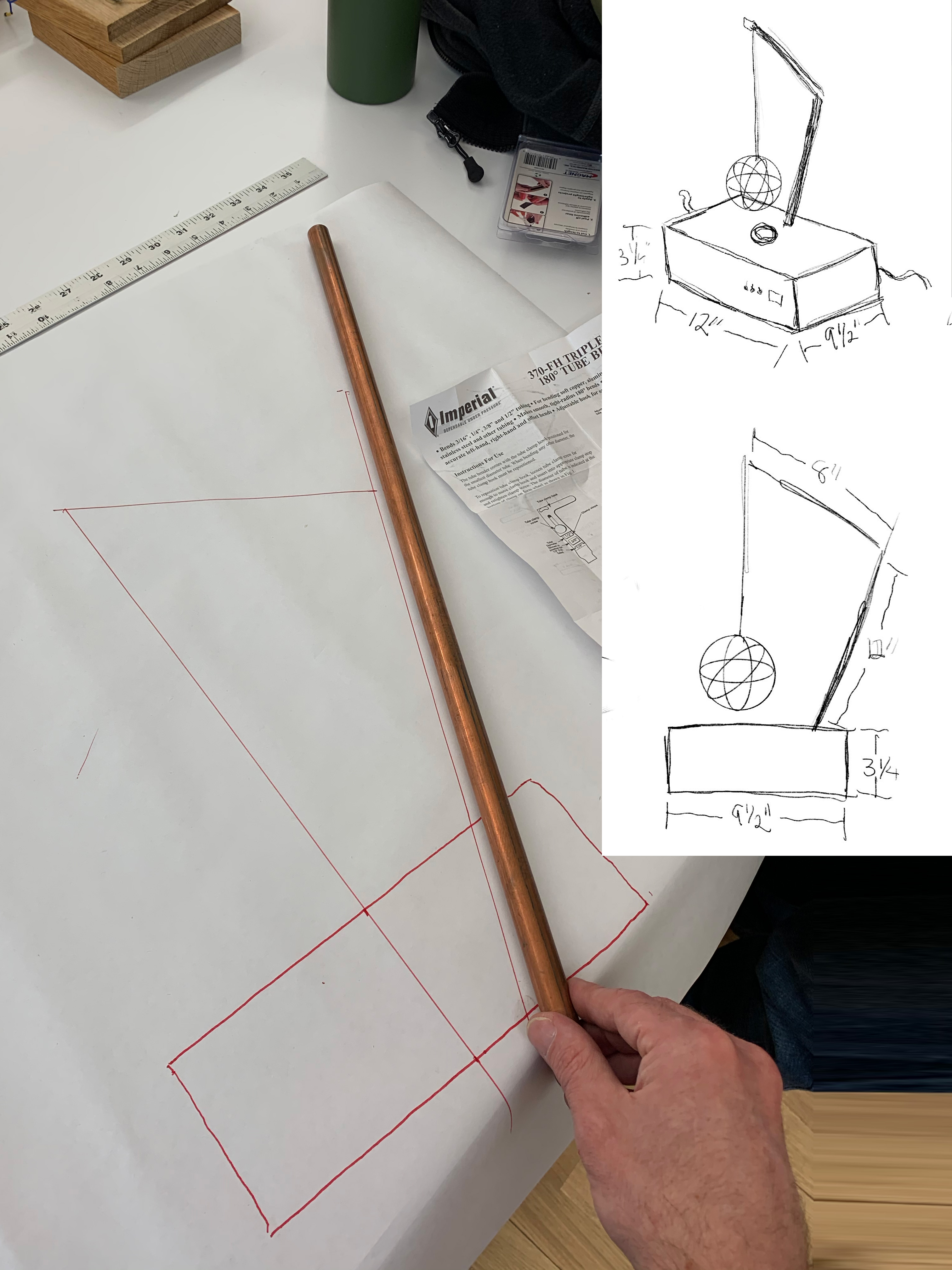 redesign drawings
redesign drawings
For the base I used a prefabbed box which I modified to house my motor, stem, and electronics. The box was stained and affixed with rubber feet.
At the great advice of Ben Light, I flipped the box upside down which allows it to still be openned and makes the electronics accessible.
Ben also suggested adding more support for the stem so a large wooden block was also added and I used the drill press to drill a diagonal whole through the box and the support block.
The block also served as an anchor point to secure the electromagnet to.
I also added a component panel to the front that houses my toggle switches as well as the volt meter.
I originally wanted to make my own electromagnet but after a few failed attempts and a good work out getting into a transformer, I ended up just using one I bought from Adafruit.
I experimented with a number of different shapes. Some worked better than others.
 shape zigzag
shape zigzag
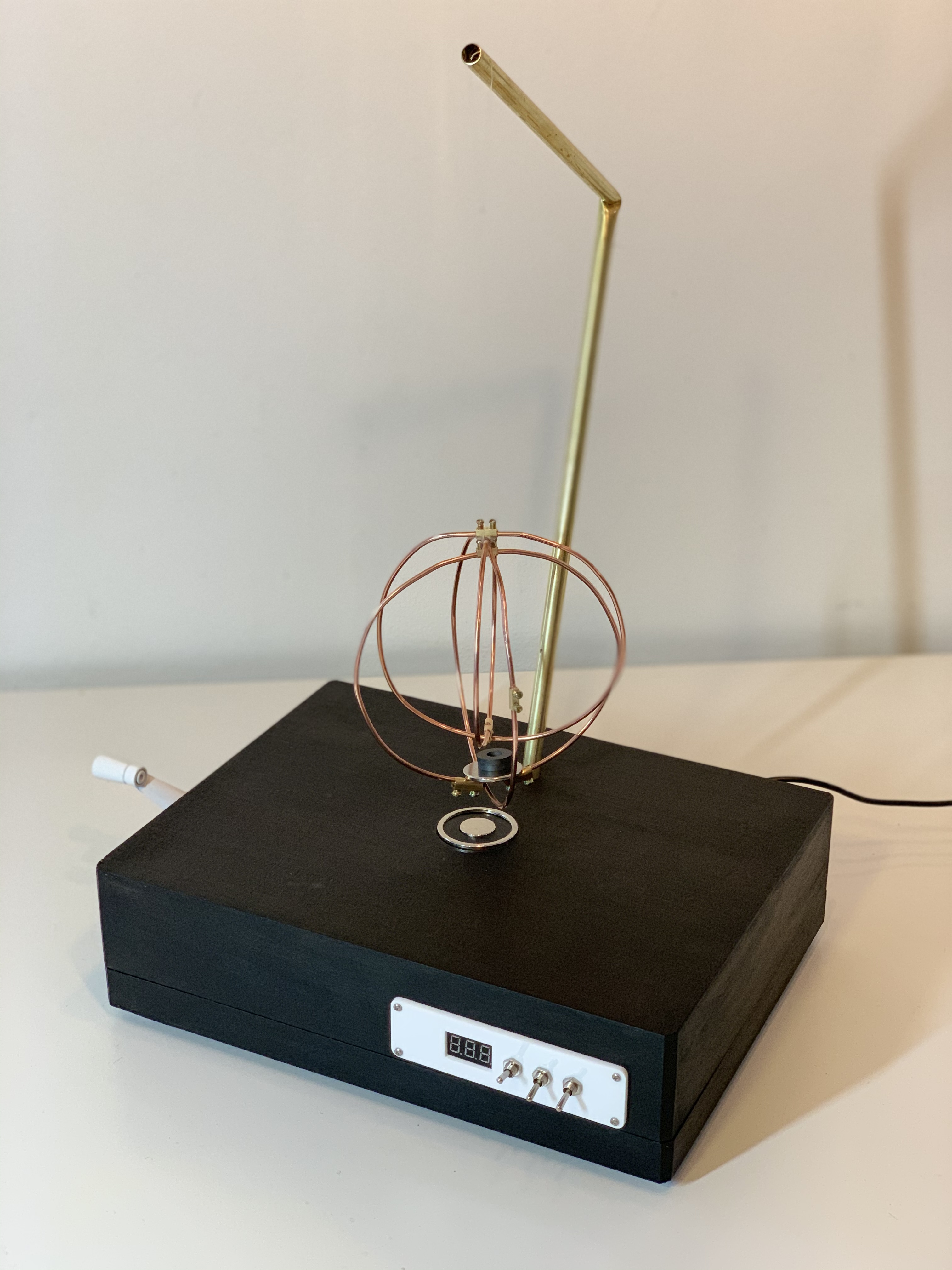 shape sphere
shape sphere
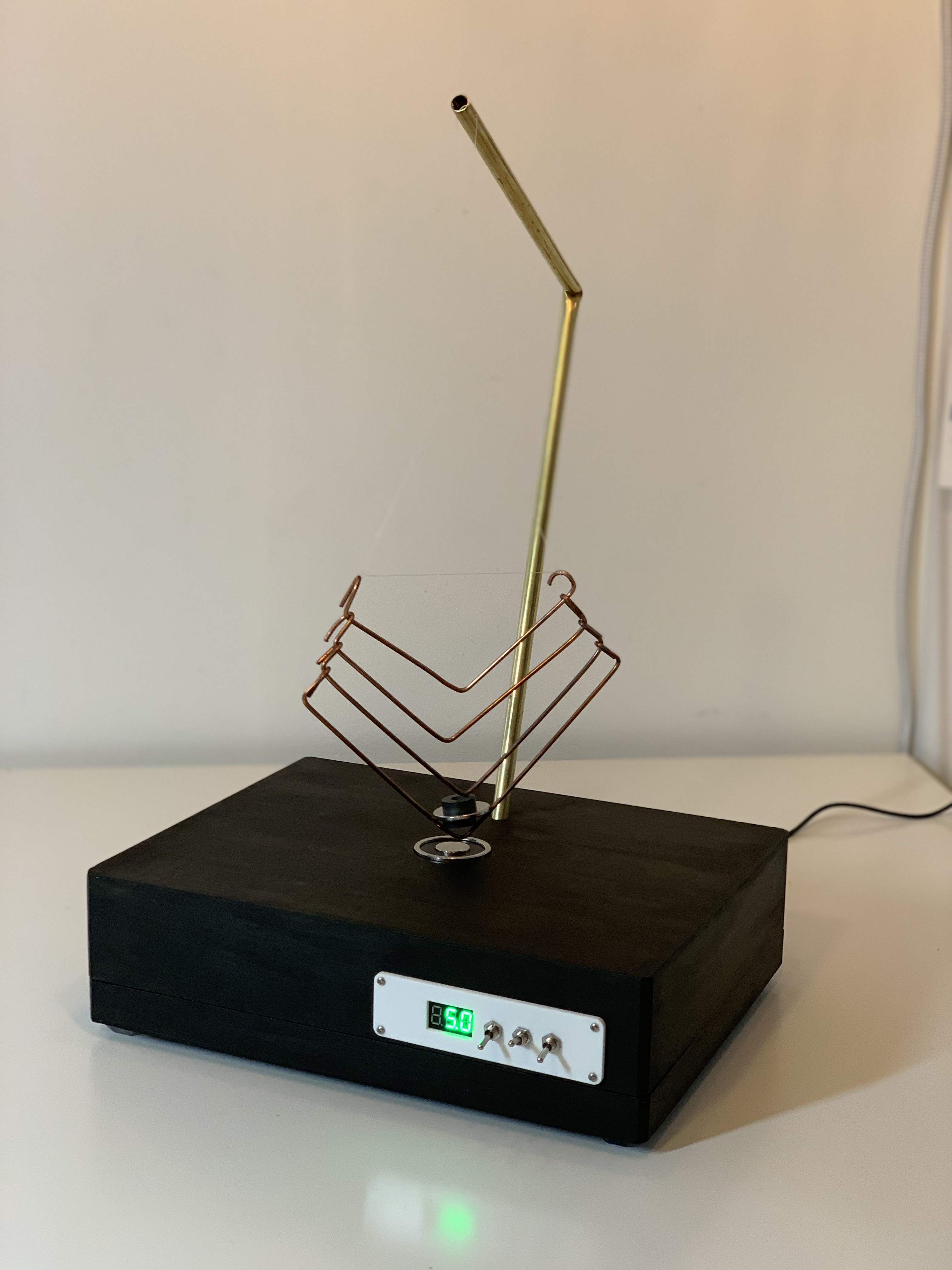 shape v
shape v
Challenges
Aside from the original prototype issue mentioned above I had a few more challenges.
1) I attempted to make my own magnets but was not successful. Not sure if the magnet wire I had was too thick but I could not get consistent magnetism.
2) I was having shorting issues. Which ended up be caused by sending signals from both the h-bridge and the crank at the same time. I added toggle switches to be able to enable and disable the connections.
3) Low Arduino power. Jeff noticed that my mini volt meter was only registering 3v from the Arduino. Which could have been due to a problem with the circuit. Ended up just being a crappy power supply. Switching to a different supply fixed the issue.
4) The box height is a little too low which makes using the crank difficult. Resulting in inconsistent power.
5) The stem material was a challenge to get right. The first material was too thick and Ben and I crimped it with the pipe bender. The second material’s walls were too thin and it also crimped. But it was still usable. Its currently friction fit so I could replace it with a stem out of another material.
6) Placing the magnets on the pendulum sculptures was difficult. Depending on the sculpture it required fine adjustments in order for the magnets to stay. Also they needed to be placed in the correct polarity for the controls to work the same for each.
7) Tying the nylon string that hangs the sculptures. Sizing this up to the correct hanging height took way longer than I care to admit.
8) Controlling polarity with Arduino. This for some reason still produces inconsistent results. I reworked the circuit based on Jeff’s suggestion and it seems like initially it works to toggle polarity, but after a few toggles it stops. I tried for a while to correct it but could not.
9) After adjusting the circuit to try to handle the h-bridge polarity, I could no longer get readings from the volt meter on both power sources. Not a big deal. The power from the crank was so sporadic it barely registered.
Code
The code is pretty basic. It uses the Sparkfun TB6612 h-bridge library and some basic logic to read a toggle input for switching the polarity. Code is here on GitHub.
Next Steps
Ultimately, I plan to collab with my mom, who is an amazing glass artist and create a glass globe with magnetic inlays.
I’d also like to move things to a proto board. Even with some wire management it’s still a mess in there.
Wrap up
Overall I’m pleased with how this project turned out.
I enjoyed exploring magnetism, movement, and using the kinetic energy of my body as a powersource.
Photo Gallery
 kimagnet_breadboard
kimagnet_breadboard kimagnet_cutting_holes1
kimagnet_cutting_holes1 kimagnet_cutting_holes2
kimagnet_cutting_holes2 kimagnet_cutting_plywood_w_boxcutter
kimagnet_cutting_plywood_w_boxcutter kimagnet_cutting_transformers
kimagnet_cutting_transformers kimagnet_enclosure_back
kimagnet_enclosure_back kimagnet_enclosure_front
kimagnet_enclosure_front kimagnet_enclosure_front2
kimagnet_enclosure_front2 kimagnet_enclosure_left_back
kimagnet_enclosure_left_back kimagnet_enclosure_left_front
kimagnet_enclosure_left_front kimagnet_ferromagnet_frame
kimagnet_ferromagnet_frame kimagnet_found_cube
kimagnet_found_cube kimagnet_inside1
kimagnet_inside1 kimagnet_inside2
kimagnet_inside2 kimagnet_inside3
kimagnet_inside3 kimagnet_inside4
kimagnet_inside4 kimagnet_inside5
kimagnet_inside5 kimagnet_inside6
kimagnet_inside6 kimagnet_last_minute_woodglue
kimagnet_last_minute_woodglue kimagnet_motormount_re-engineer
kimagnet_motormount_re-engineer kimagnet_nonferromagnet_frame
kimagnet_nonferromagnet_frame kimagnet_parts
kimagnet_parts kimagnet_parts2
kimagnet_parts2 kimagnet_parts3
kimagnet_parts3 kimagnet_redesign_drawings
kimagnet_redesign_drawings kimagnet_shape_cube
kimagnet_shape_cube kimagnet_shape_sphere
kimagnet_shape_sphere kimagnet_shape_v
kimagnet_shape_v kimagnet_shape_zigzag
kimagnet_shape_zigzag kimagnet_shapes
kimagnet_shapes kimagnet_sphere
kimagnet_sphere kimagnet_tight_spaced_adjustments
kimagnet_tight_spaced_adjustments kimagnet_v
kimagnet_v kimagnet_wire_closeup
kimagnet_wire_closeup kimagnet_zigzag
kimagnet_zigzag




























